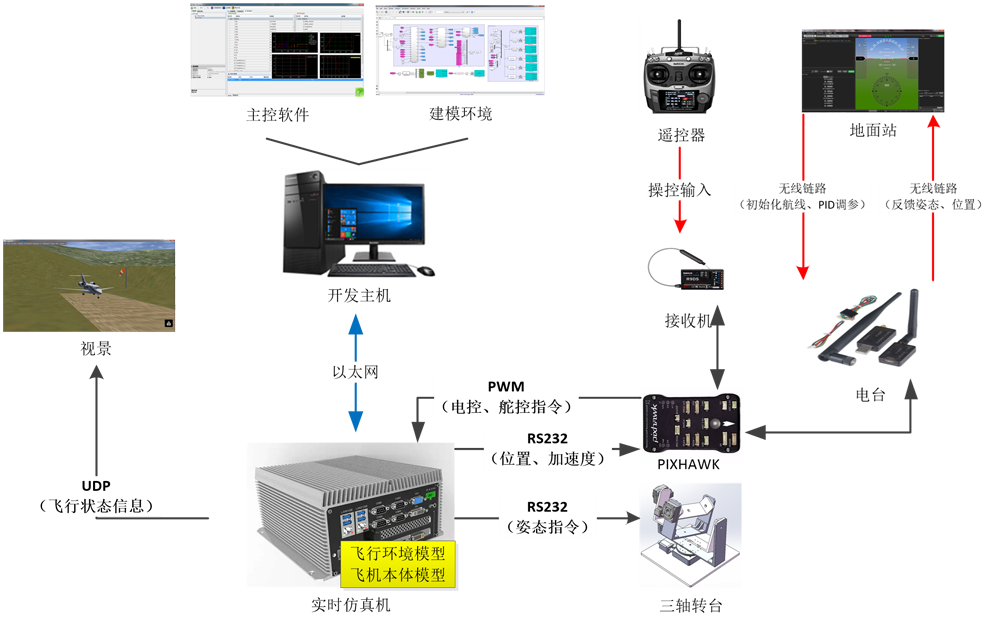





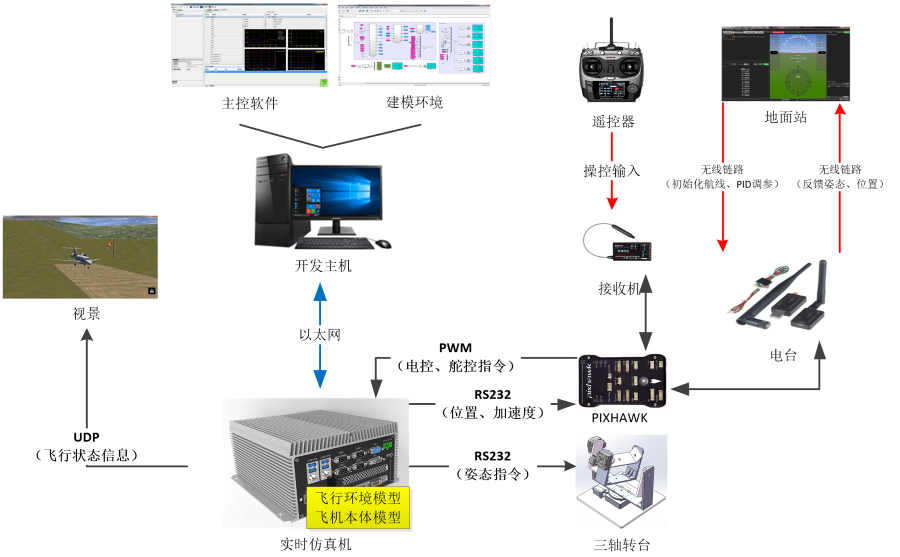
飞行器飞行仿真实验平台采用“上-下”位机架构,上位机是1台Windows主控计算机,是用户进行控制系统设计和实验运行管理的环境;下位机是一台实时仿真机,运行飞行器动力学、传感器及大气环境模型实时代码,并通过I/O通道飞控板实现连接。
全国服务热线:( 周一至周六 08:30 ~ 17:30 )
北京市丰台区南四环西路128号诺德中心一期三号楼801-816

微信咨询
CopyRight © 2022 版权所有 北京中科航星科技有限公司 All Rights Reserved 备案号:京ICP备2021026238号-1










